URG sensor utility. More...
#include "urg_sensor.h"Go to the source code of this file.
Functions | |
| const char * | urg_error (const urg_t *urg) |
| Returns the string message for the last URG error. | |
| void | urg_distance_min_max (const urg_t *urg, long *min_distance, long *max_distance) |
| Obtains the minimum and maximum distance values from sensor measurements. | |
| void | urg_step_min_max (const urg_t *urg, int *min_step, int *max_step) |
| Gets the minimum and maximum step numbers. | |
| long | urg_scan_usec (const urg_t *urg) |
| Returns the time [usec] for 1 scan. | |
| int | urg_max_data_size (const urg_t *urg) |
| Returns the maximum size of data received from the sensor. | |
| double | urg_index2rad (const urg_t *urg, int index) |
| Converts index to angle in radians. | |
| double | urg_index2deg (const urg_t *urg, int index) |
| Converts index to angle in degrees. | |
| int | urg_rad2index (const urg_t *urg, double radian) |
| Converts angle in radians to index. | |
| int | urg_deg2index (const urg_t *urg, double degree) |
| Converts angle in degrees to index. | |
| int | urg_rad2step (const urg_t *urg, double radian) |
| Converts angle in radians to step number. | |
| int | urg_deg2step (const urg_t *urg, double degree) |
| Converts angle in degrees to step number. | |
| double | urg_step2rad (const urg_t *urg, int step) |
| Converts step number to angle in radians. | |
| double | urg_step2deg (const urg_t *urg, int step) |
| Converts step number to angle in degrees. | |
| int | urg_step2index (const urg_t *urg, int step) |
| Converts step number to index. | |
URG sensor utility.
| void urg_distance_min_max | ( | const urg_t * | urg, |
| long * | min_distance, | ||
| long * | max_distance | ||
| ) |
Obtains the minimum and maximum distance values from sensor measurements.
\param[in] urg URG control structure \param[out] min_distance minimum distance [mm] \param[out] max_distance maximum distance [mm] Example
long min_distance, max_distance; urg_distance_min_max(&urg, &min_distance, &max_distance); for (int i = 0; i < n; ++i) { long distance = data[i]; if ((distance < min_distance) || (distance > max_distance)) { continue; } ... }
Returns the string message for the last URG error.
\param[in] urg URG control structure \retval String message for the last URG error Example
if (!urg_open(&urg, "/dev/ttyACM0", 115200, URG_SERIAL)) { printf("urg_open: %s\n", urg_error(&urg)); return -1; }
| double urg_index2rad | ( | const urg_t * | urg, |
| int | index | ||
| ) |
Converts index to angle in radians.
Index is the position of each measurement data in the array returned using urg_get_distance(). This function applies to the last array of measurement data read from the sensor. \param[in] urg URG control structure \param[in] index index value \return Angle [radian] The index value depends on the start/end steps configuration used for measurement. \image html sensor_index_image.png shows the relation between start/end step configuration and index Example
int n = urg_get_distance(&urg, data, NULL); for (int i = 0; i < n; ++i) { long distance = data[i]; double radian = urg_index2rad(i); double x = distance * cos(radian); double y = distance * sin(radian); printf("%.1f, %.1f\n", x, y); }
| int urg_rad2step | ( | const urg_t * | urg, |
| double | radian | ||
| ) |
Converts angle in radians to step number.
Conversion to angle (radian) is performed according to the min/max step definition using urg_step_min_max().
| [in] | urg | URG control structure |
| [in] | radian | angle [radian] |
When the conversion from angle to step results on a fractional number, the value is rounded down towards zero (floor).
\see urg_step_min_max(), urg_deg2step(), urg_step2rad(), urg_step2deg()
| void urg_step_min_max | ( | const urg_t * | urg, |
| int * | min_step, | ||
| int * | max_step | ||
| ) |
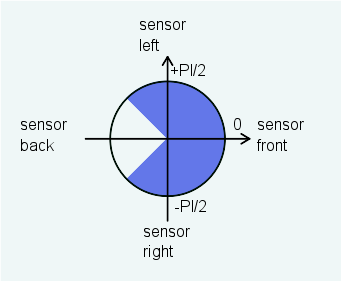
Gets the minimum and maximum step numbers.
Returns the minimum step and maximum step values as configured using urg_set_scanning_parameter() \param[in] urg URG control structure \param[out] min_step minimum step \param[out] max_step maximum step As seen from the top of the sensor: the frontal step is 0, going counter-clockwise are positive values, going clockwise are negative values. \image html sensor_step_image.png shows the relation between sensor and steps The actual values for min_step, max_step change with sensor type/series. Example
urg_step_min_max(&urg, &min_step, &max_step); printf("range first: %d [deg]\n", urg_step2deg(&urg, min_step)); printf("range last : %d [deg]\n", urg_step2deg(&urg, max_step));
 1.8.0
1.8.0

